Wraz z dynamicznym rozwojem sztucznej inteligencji i robotyki, roboty humanoidalne stopniowo stają się nowymi partnerami w inteligentnej produkcji i życiu w przyszłości. W tej dziedzinie serwosilnik, jako „serce” robota humanoidalnego, bezpośrednio decyduje o dokładności i stabilności ruchu robota. Uruchomienie i działanie serwosilnika zależy od dedykowanego serwonapędu, a układ sterujący wewnątrz napędu odpowiada za precyzyjną regulację prądu.
W tym procesie kondensatory w układzie napędowym serwosilnika odgrywają kluczową rolę i są kluczowym czynnikiem zapewniającym wydajną pracę humanoidalnego robota.
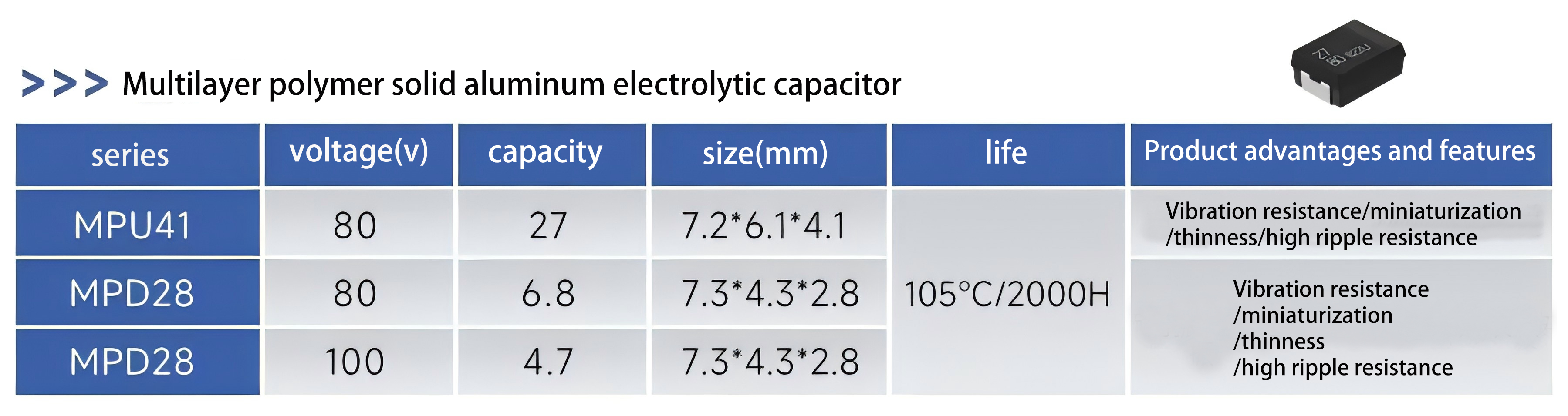
Wielowarstwowy polimerowy kondensator elektrolityczny aluminiowy:
01 Odporność na wibracje
Roboty humanoidalne często doświadczają wibracji mechanicznych podczas wykonywania zadań, zwłaszcza w dynamicznym środowisku. Odporność na wibracjewielowarstwowe polimerowe kondensatory elektrolityczne aluminiowezapewnia, że mogą one nadal stabilnie pracować pomimo tych wibracji i nie są podatne na awarie lub pogorszenie wydajności, zwiększając w ten sposób niezawodność i żywotność napędów serwosilników.
02 Miniaturyzacja i cienkość
Roboty humanoidalne mają surowe wymagania dotyczące przestrzeni i masy, szczególnie w stawach i kompaktowych przestrzeniach. Miniaturyzacja i cienkość wielowarstwowych polimerowych kondensatorów elektrolitycznych z litego aluminium umożliwiają im uzyskanie większej wydajności pojemnościowej w ograniczonej przestrzeni, co pomaga zmniejszyć rozmiar i wagę napędu silnikowego oraz poprawić efektywność wykorzystania przestrzeni i elastyczność ruchu całego systemu.
03 Wysoka odporność na prąd tętniący
Wielowarstwowe polimerowe, aluminiowe kondensatory elektrolityczne charakteryzują się doskonałą odpornością na wysokie tętnienia prądu. Ich niska rezystancja szeregowa (ESR) pozwala na skuteczną filtrację szumów o wysokiej częstotliwości i tętnień prądu, eliminując wpływ zakłóceń zasilania na precyzyjne sterowanie serwosilnikiem, poprawiając tym samym jakość zasilania napędu i precyzję sterowania silnikiem.
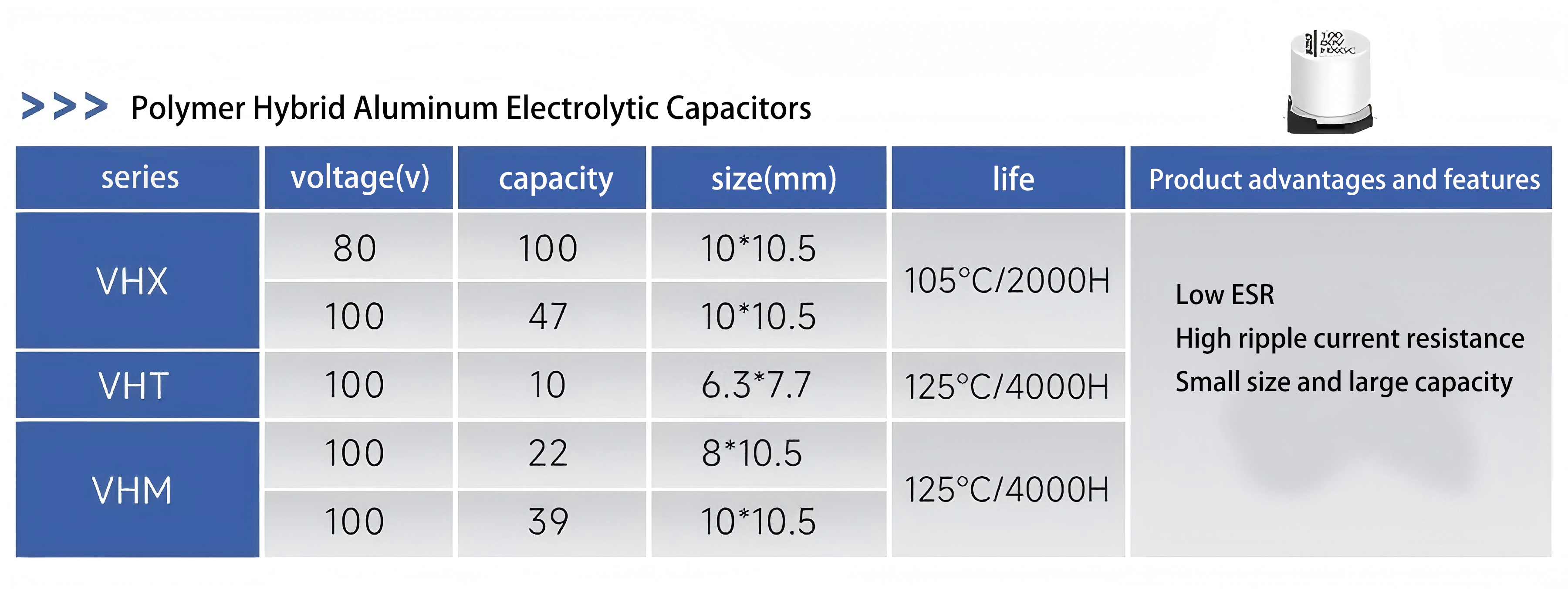
Hybrydowe aluminiowe kondensatory elektrolityczne polimerowe
01 Niska ESR (równoważna rezystancja szeregowa)
Hybrydowe aluminiowe kondensatory elektrolityczne polimeroweMają niską charakterystykę ESR, co pomaga zmniejszyć generowanie ciepła w obwodzie mocy i wydłużyć żywotność kondensatora. Ich zastosowanie w napędach serwosilników może skutecznie zmniejszyć straty energii, zapewnić stabilność i dokładność sygnałów sterujących silnikami, a tym samym umożliwić bardziej efektywne zarządzanie energią.
02 Wysoka odporność na prąd tętniący
Hybrydowe, aluminiowe kondensatory elektrolityczne polimerowe charakteryzują się doskonałą odpornością na wysokie tętnienia prądu, wytrzymują duże wahania prądu i zapewniają stabilną pracę w środowiskach o wysokiej częstotliwości i silnych zmianach prądu. Ta cecha pozwala im skutecznie filtrować szumy i tętnienia prądu w napędach serwosilników, zapobiegać wpływowi wahań prądu na sterowanie ruchem robota oraz zapewniać stabilność i dokładność robota podczas szybkich i złożonych operacji.
03 Mały rozmiar i duża pojemność
Niewielkie rozmiary hybrydowych, aluminiowych kondensatorów elektrolitycznych polimerowych pozwalają na uzyskanie dużej pojemności w ograniczonej przestrzeni, co jest szczególnie przydatne w przegubach robotów humanoidalnych i innych kompaktowych elementach. Duża pojemność magazynowania energii nie tylko zmniejsza zajmowaną przestrzeń, ale także zapewnia, że robot może nieprzerwanie i stabilnie dostarczać energię podczas wykonywania zadań o dużym obciążeniu, spełniając tym samym wymagania dotyczące wydajnego prowadzenia pojazdów.
Zastosowanie wielowarstwowych polimerowych, litych aluminiowych kondensatorów elektrolitycznych oraz hybrydowych polimerowych, aluminiowych kondensatorów elektrolitycznych w sterownikach serwosilników robotów humanoidalnych niewątpliwie zapewnia robotom bardziej wydajne, stabilne i długotrwałe zasilanie. Dzięki optymalizacji zarządzania energią, poprawie dokładności napędu silnika i poprawie stabilności systemu, stały się one istotnym elementem zapewniającym wydajne działanie robotów.
Czas publikacji: 24-02-2025